|
Hi, I am an MSCS student in the CSE Department at UC San Diego . I am currently a part of Visual Computing Lab advised by Dr. Manmohan Chandraker. I completed my B.Tech in Computer Science with Honours in Computer Vision at IIIT Hyderabad, where I was advised by Dr. Ravi Kiran in the mobility group, focusing on perception-driven computer vision algorithms, with an emphasis on dashcam-based applications. I have worked at the Center for Visual Information and Technology (CVIT) on multiple perception-focused computer vision projects. Additionally, I contributed to autonomous driving research at the Robotics Research Center (RRC) under Dr. Madhava Krishna. I also spent time at the Machine Learning Lab (MLL) with Dr. Charu Sharma and Dr. Avinash Sharma, where I worked on 3D Gaussian Splatting compression. Email / Resume / Google Scholar / GitHub / LinkedIn |

|
|
My research interests lie in the field of Computer Vision and Robotics, with a focus on perception for autonomous systems. I am particularly interested in developing algorithms that enable robots to understand and interact with their environment effectively. |
|
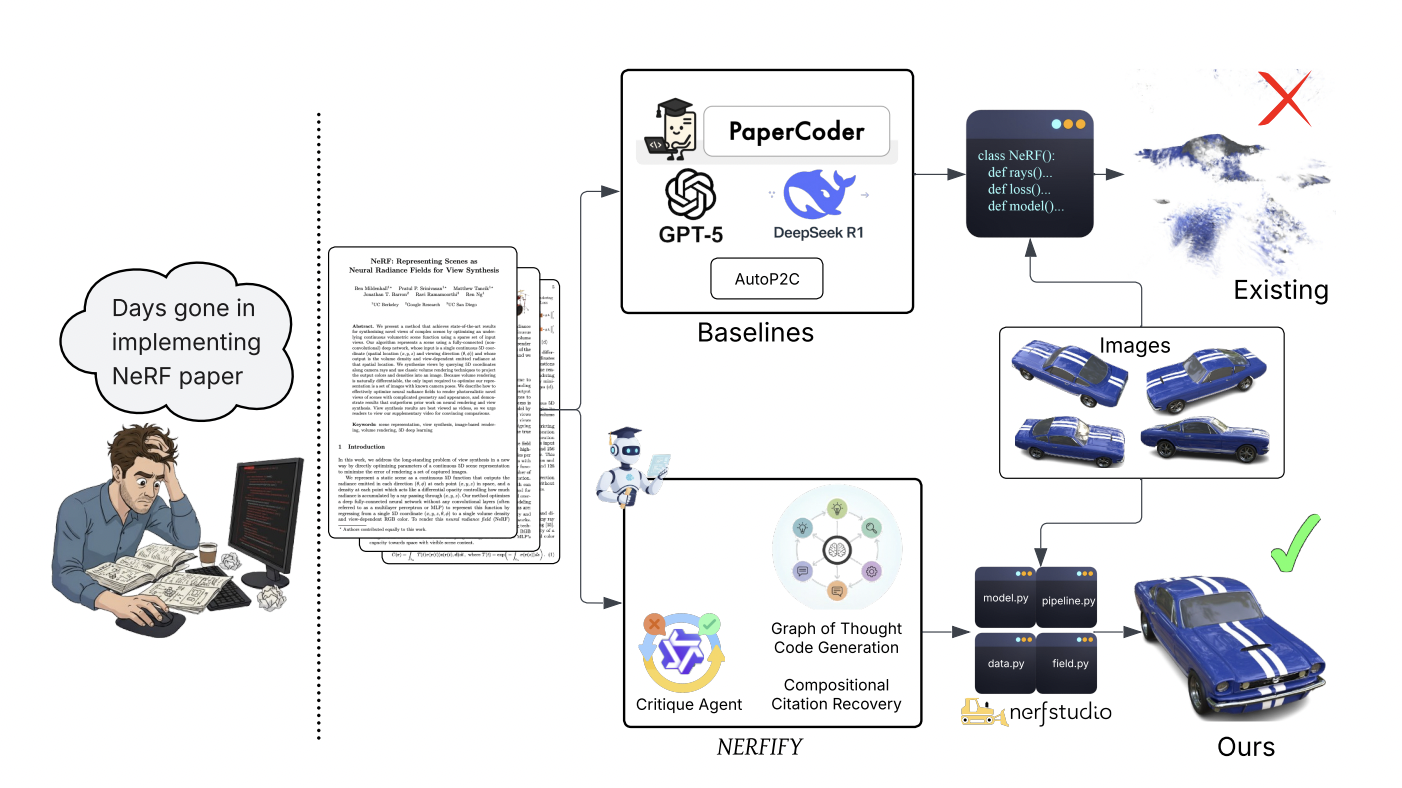
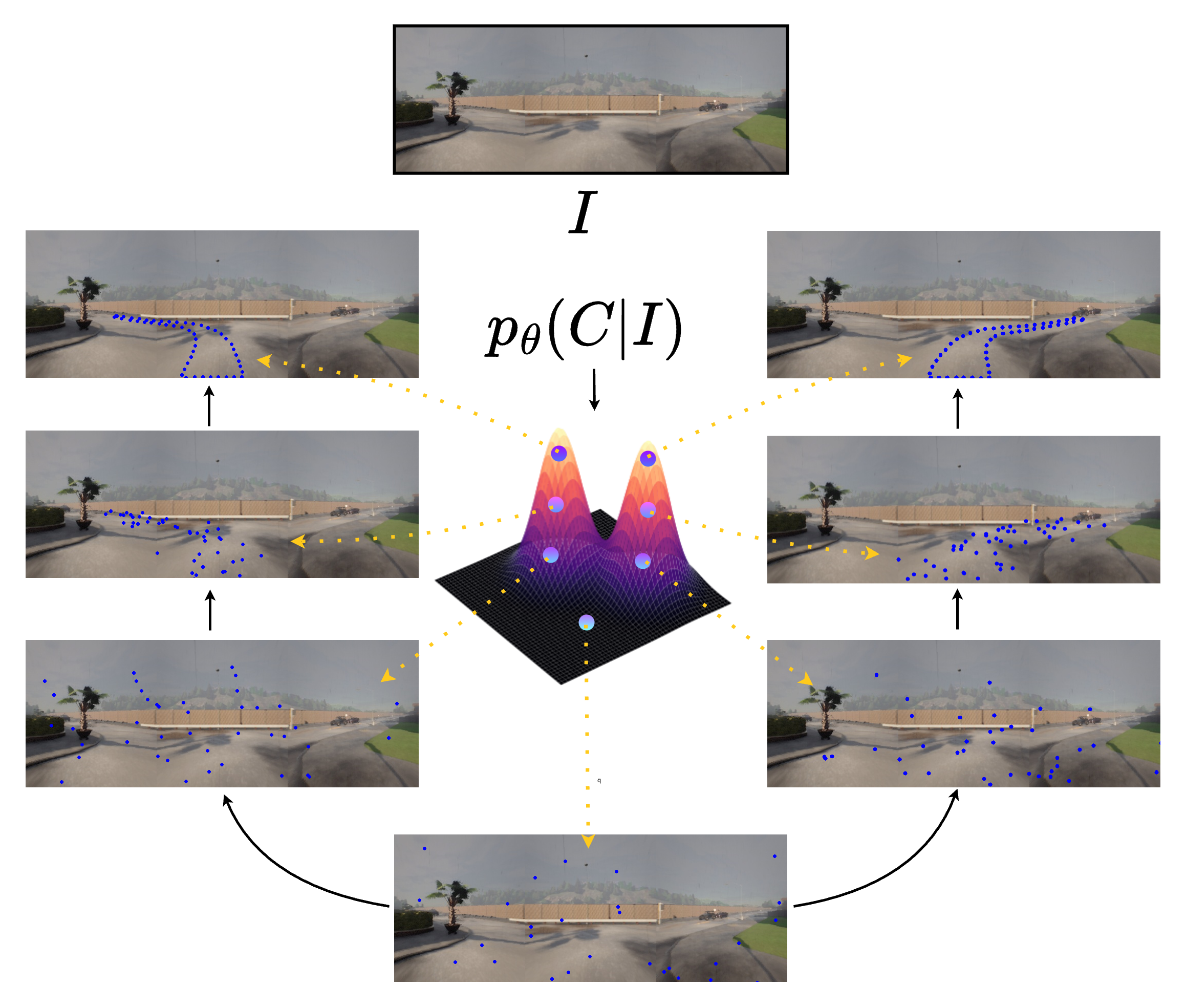
Seemandhar Jain, Keshav Gupta, Kunal Gupta, Manmohan Chanraker CVPR 2026 paper / project page / arXiv / code We introduce NERFIFY, a multi-agent framework that converts NeRF research papers into trainable Nerfstudio plugins. |

|
Keshav Gupta*, Akshat Sanghvi*, Shreyas Reddy Palley, Astitva Srivastava, Charu Sharma, Avinash Sharma AAAI 2026 paper / project page / arXiv / code SymGS leverages Reflective Symmetries in a 3DGS scene for compression while preserving rendering quality. |
|
Keshav Gupta, Tejas Stephen Stanley, Pranjal Paul, Arun K. Singh, K. Madhava Krishna, IROS 2025 paper / project page / arXiv / code Diffusion-FS is a self-supervised approach for freespace prediction using monocular camera images. It takes in a dataset of raw driving logs containing image and ego trajectory pairs and processes such an unannotated dataset to generate free-space segments essential for autonomous driving. |

|
Deepti Rawat*, Keshav Gupta*, Aryamaan Basu Roy, Ravi Kiran Sarvadevabhatla, WACV 2025 paper / project page / arxiv / code We propose a novel Segmentation and Cross-Association (SAC) module and a robust cross-association-based tracking algorithm optimized for the simultaneous presence of riders and motorcycles. We also introduce the RideSafe-400 dataset, a comprehensive annotated dashcam video dataset for triple riding and helmet rule violations. |
Template stolen from Jon Barron